Image Feature Matching
Image Feature 란 특정 어플리케이션과 관련된 계산 작업을 해결하는 데 더 적합한 정보 조각을 의미한다.
좋은 Feature란
- 조명 (Illumination)
- 이동 (Translation)
- 스케일 (Scale)
- 회전 (Rotation)
- 원근 변환 (Perspective transform)
에 대해 불변 (invariant) 해야 한다.
또 Computationally inexpensive (계산 비용이 저렴) 하고, Memory efficient (메모리 효율적) 이어야 한다.
ORB
oFast detector + r-BRIEF descriptor
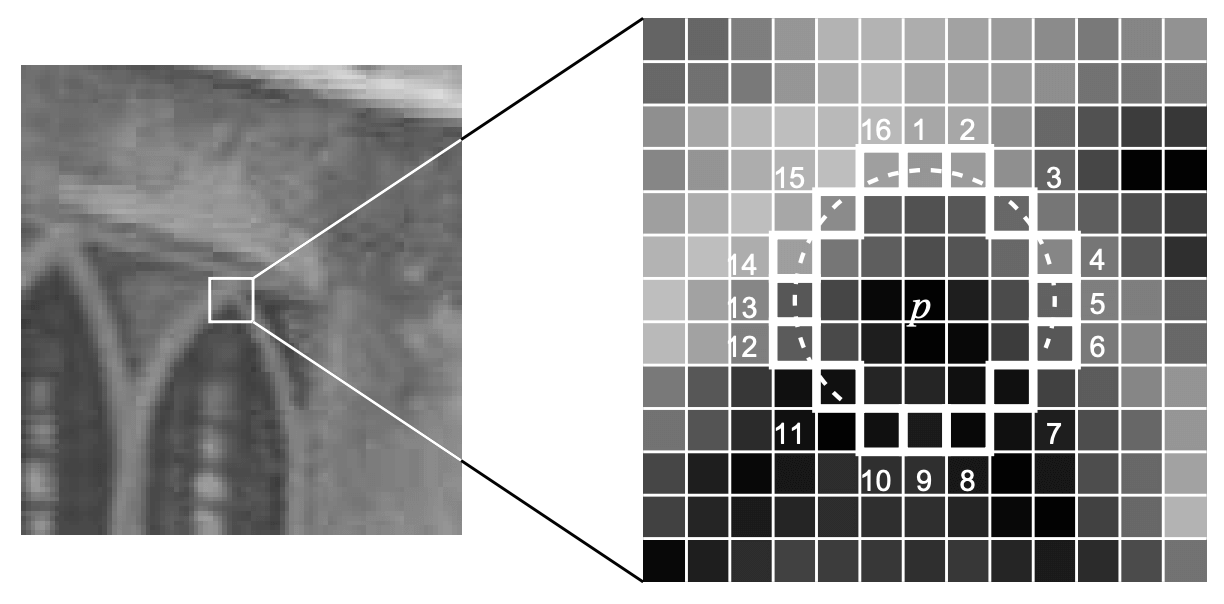
FAST
N개 이상의 연속된 픽셀의 intensity가 중앙 픽셀의 강도보다 높거나 낮을 때 코너로 판별한다.
BRIEF
binary intensity test set 으로부터 구성된 이미지 패치의 bit string descriptor
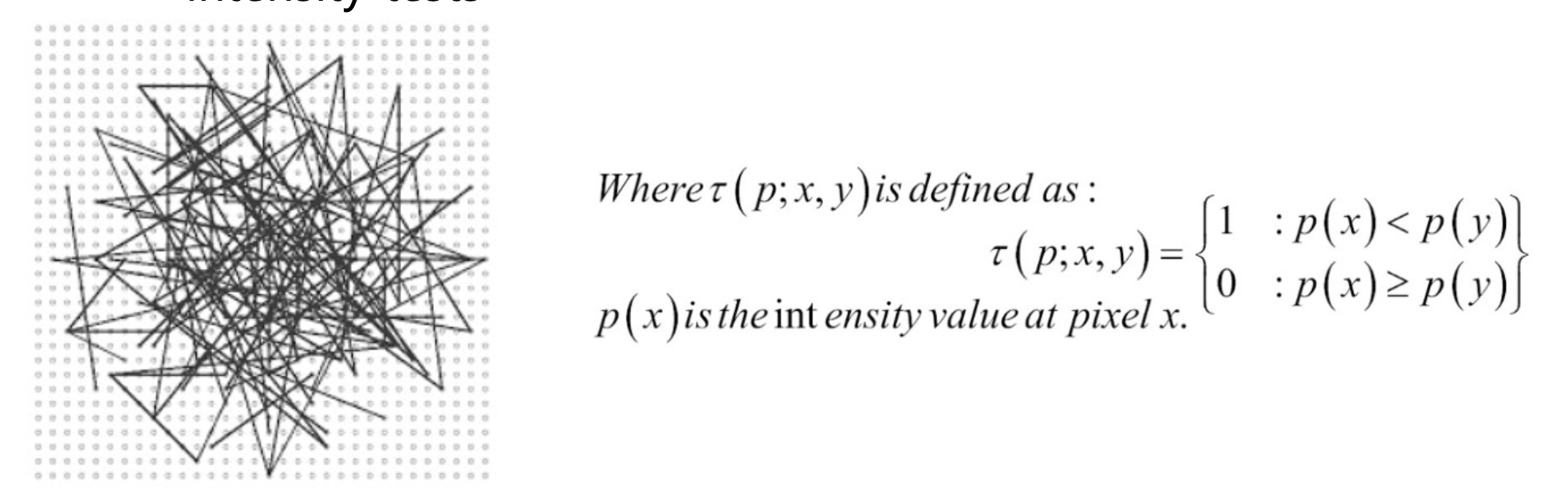
feature 점 주변에 무작위 픽셀 x, y 쌍을 선택해서 두 픽셀의 intensity를 비교해서 x가 y보다 작으면 1 아니면 0
ORB는 빠르고, illumination과 rotation에 대해 invariant를 갖는다
Image matching
- Feature Extractor를 사용하여 input 이미지로부터 feature 찾기
- Feature Descriptor를 사용하여 각 feature를 describe
- input 이미지와 feature 사이의 유사성을 비교
- “Good Matching”을 추출
Good Matching
두 특징 A와 B 사이가 좋은 매칭이라면 오직 A와 B만이 서로 유사해야 한다.
NNDR을 사용하여 Good Matching을 추정할 수 있다.
NNDR
NNDR이 0에 가까울수록 (가장 좋은 매칭이 두번째로 좋은 매칭보다 훨씬 좋을수록) 좋은 매칭
Convolutional Neural Network (CNN)
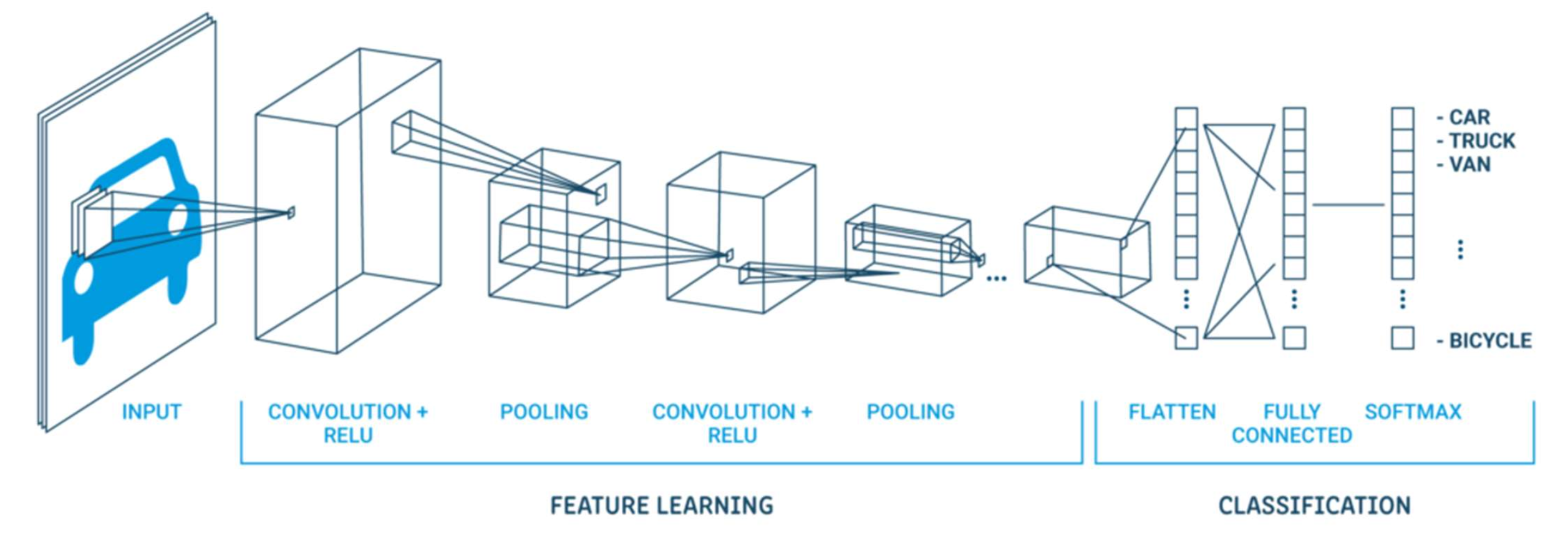
Convolution
spatial filtering과 비슷하게 커널을 연산하면 된다.
이때 Stride 는 커널이 input image를 지나갈 때 한번에 몇 픽셀씩 건너뛸지를 결정한다.
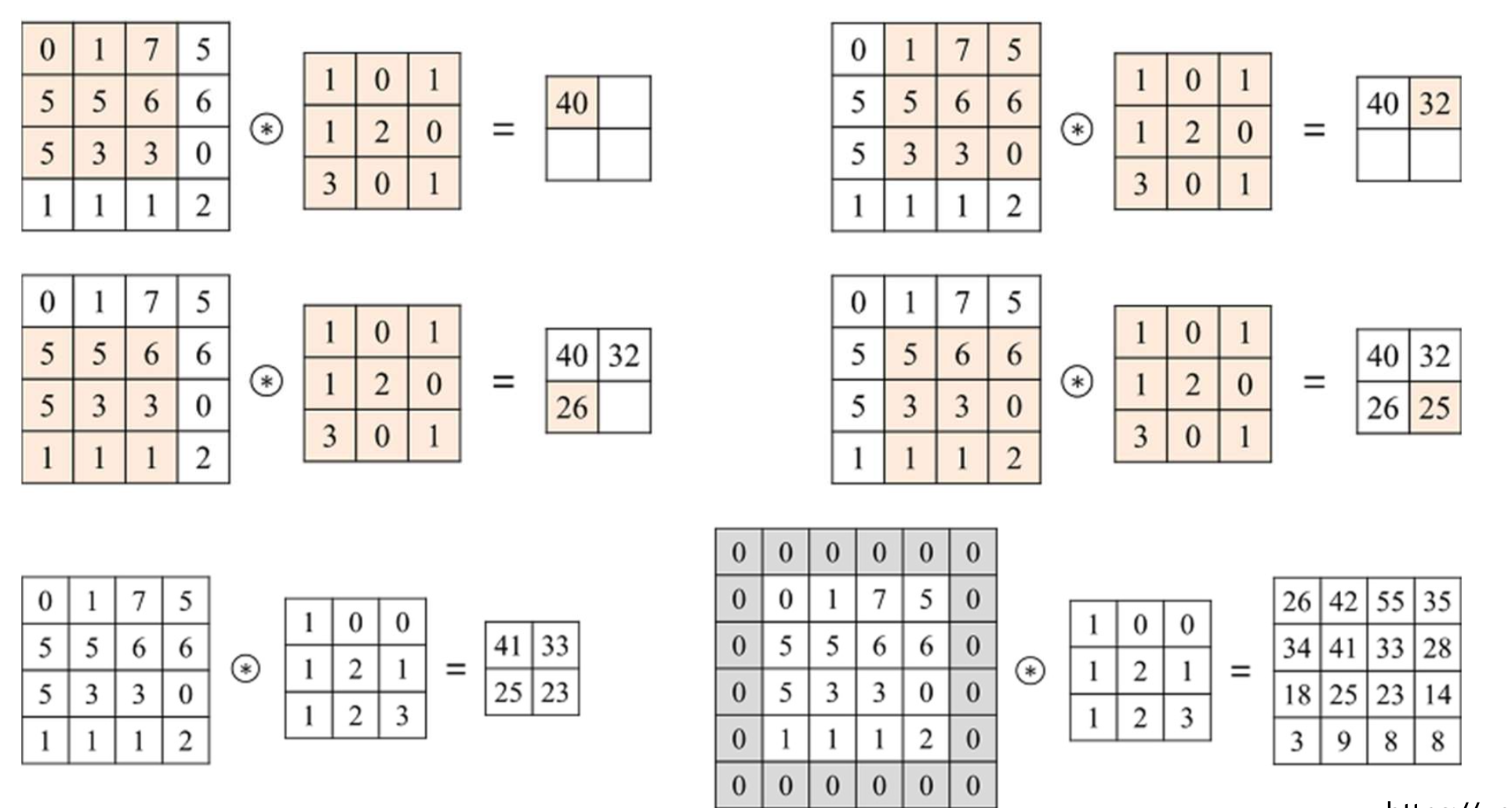
아래 예시처럼 4x4 결과를 가지기 위해 input 이미지에 padding을 붙일 수 있다.
Relu
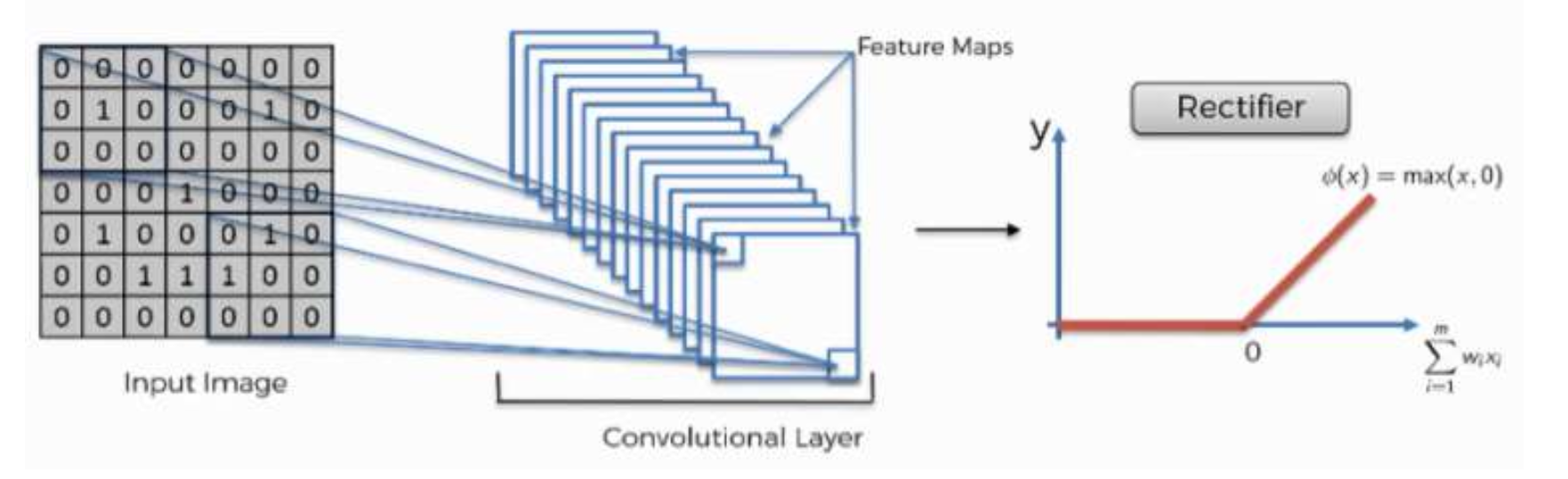
일종의 non-linear (비선형) 함수로,
CNN의 계산 결과가 양수일때만 통과시키고 음수일때는 통과하지 않는다.
이를 통해 이미지의 비선형성을 증가시킨다.
Pooling
Convolution 연산을 통과한 Feature map의 크기를 줄이는 과정 (다운 샘플링)
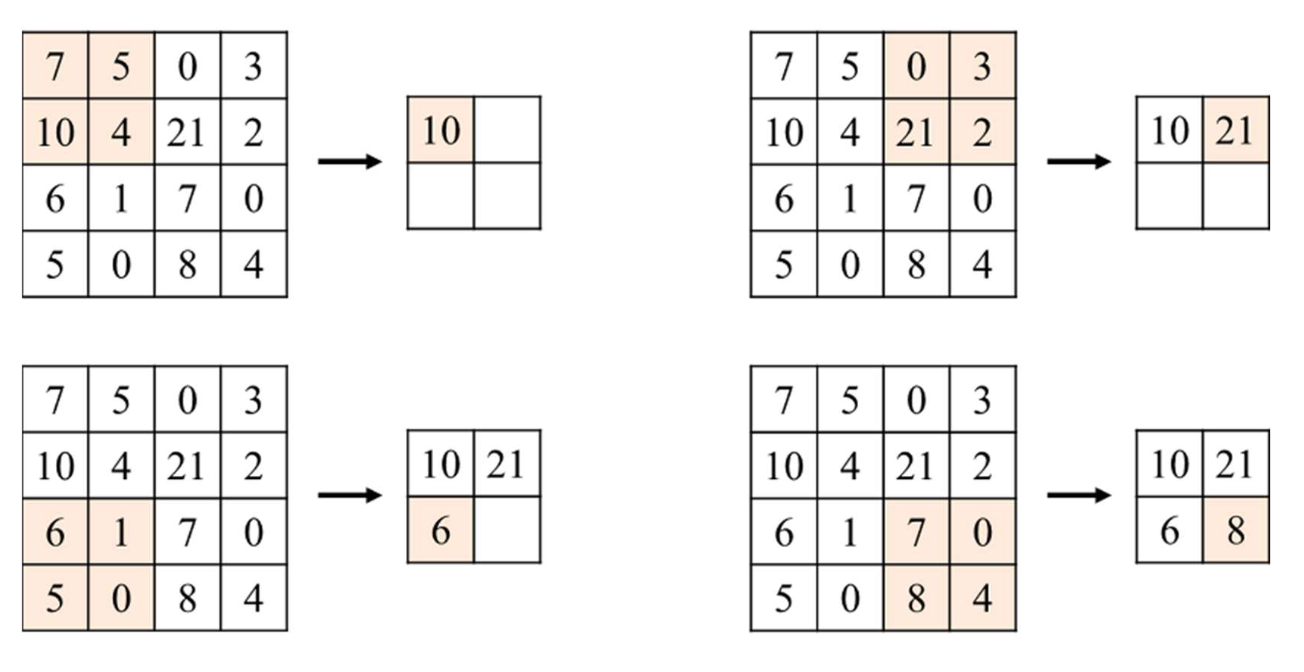
위 예시는 Max Pooling 과정으로, 2x2 filter 필터를 사용하여 해당 영역에서 가장 큰 값을 선택한다.
Code
drawMatches
void cv::drawMatches(
InputArray img1,
const std::vector<KeyPoint>& keypoints1,
InputArray img2,
const std::vector<KeyPoint>& keypoints2,
const std::vector<DMatch>& matches1to2,
InputOutputArray outImg,
const Scalar & matchColor = Scalar::all(-1),
const Scalar & singlePointColor = Scalar::all(-1),
const std::vector<char>& matchesMask = std::vector<char>(),
int flags = DrawMatchesFlags::DEFAULT
)img1: 왼쪽에 그려질 이미지keypoints1:img1에서 검출된 KeyPoint 벡터img2: 오른쪽에 그려질 이미지keypoints2:img2에서 검출된 KeyPoint 벡터matches1to2: 두 이미지 간 매칭 정보가 담긴 DMatch 벡터outImg: 두 이미지가 나란히 붙고 매칭 결과가 그려질 최종 출력 이미지matchColor: 매칭에 성공한 KeyPoint와 그 사이를 잇는 선의 색상Scalar::all(-1): 각 매칭마다 랜덤 색상으로 지정
singlePointColor: 매칭에 실패한 단일 KeyPoint를 그릴 색상matchesMask: 어떤 matches를 그릴지 정하는 마스크flags: 그리기 옵션을 지정DrawMatchesFlags::DEFAULT: 매칭에 실패한 점과 성공한 점 모두 그림DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS: 실패는 그리지 않음
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main() {
Mat query, image, descriptors1, descriptors2;
Ptr<ORB> orbF = ORB::create(1000);
vector<KeyPoint> keypoints1, keypoints2;
vector<vector<DMatch>> matches; // descriptor match
vector<DMatch> goodMatches;
BFMatcher matcher(NORM_HAMMING);
Mat imgMatches;
int i, k;
float nndr;
query = imread("query.jpg");
image = imread("input.jpg");
if (query.empty() || image.empty()) return -1;
// Compute ORB Features
orbF->detectAndCompute(query, noArray(), keypoints1, descriptors1);
orbF->detectAndCompute(image, noArray(), keypoints2, descriptors2);
// KNN Matching (k-nearest neighbor matching)
// Find best and second-best matches
k = 2;
matcher.knnMatch(descriptors1, descriptors2, matches, k);
// Find out the best match is definitely better than the second-best match
nndr = 0.6f; // NNDR 값이 0에 가까울수록 good matching 이다.
for (i = 0; i < matches.size(); ++i) {
if (matches.at(i).size() == 2 &&
matches.at(i).at(0).distance <= nndr * matches.at(i).at(1).distance) {
goodMatches.push_back(matches[i][0]);
}
}
drawMatches(query, keypoints1, image, keypoints2, goodMatches, imgMatches,
Scalar::all(-1), Scalar(-1), vector<char>(),
DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);
if (goodMatches.size() < 4) {
cout << "Matching failed" << endl;
return 0;
}
imshow("imgMatches", imgMatches);
waitKey(0);
return 0;
}