Image_Segmentation
Introduction
Image / Video Segmentation이란
디지털 이미지를 여러 regions으로 분리하는 과정
- Input: 그레이스케일 이미지나 컬러 이미지
- Output (two-class 문제에 대해): binary 이미지 (0과 255)
Thresholding
기본 개념
- 가정
- 배경과 객체의 intensity가 다르다
- 배경과 객체가 균일하다 (homogeneous)
적절한 threshold 를 찾는 것이 중요하다.
Challenges
- Noise
- 이미지에 노이즈가 포함돼있을 경우 노이즈 픽셀이 obj나 background의 분포를 벗어나 잘못 분석될 수 있음
- Illumination and reflectance
- 이미지 내에서 조명과 반사가 균일하지 않을 경우 픽셀의 intensity 값이 크게 달라질 수 있음
Global Thresholding
모든 픽셀에 대해 같은 임계값을 사용
Basic method
- Global threshold 에 대한 초기 추정치 선택
- 를 기준으로 이미지를 두 그룹으로 분할
- 각 그룹의 평균 계산
- 새로운 를 계산
- 값 차이가 적을 때까지 2~4단계 반복
Otsu’s method
Well-thresholded 클래스는 픽셀의 intensity 가 서로 뚜렷하게 구분되어야 한다는 가정에 기초
즉, 클래스 간 best separation을 제공하는 threshold 값이 best threshold 값이 된다.
이미지의 히스토그램에 대해 수행되는 계산을 기반으로 하여 최적의 를 찾아냄
- normalized 히스토그램 계산
- 각 클래스 간 threshold 에 대해 클래스 간 분산 를 계산
- 가 최대가 되는 임계값 를 찾기
Local (adaptive) Thresholding
픽셀마다 다른 임계값 적용
인접 픽셀의 intensity 분포에 따라 thresholding 적용
ADAPTIVE_THRESH_MEAN_C- 주변의 지정된 블록 사이즈 내의 픽셀 값들의 평균을 계산하고 상수 C를 빼기
ADAPTIVE_THRESH_GAUSSIAN_C- 가우시안 필터와의 cross-correlation 을 사용하여 이웃 픽셀들의 intensity에 가중치를 부여한 합을 계산하고 상수 C를 빼기
GrabCut
- Object를 포함하는 직사각형 영역 입력 → 직사각형 밖은 background, 직사각형 안은 unknown
- 사용자가 준 정보에 따라 초기 라벨링 진행 → foreground와 background
- Gaussian Mixture Model 을 사용하여 foreground와 background를 모델링
GMM* - 조건부 확률 를 이용 Bayse rule -
A가 픽셀 값이고, B가 배경이라고 가정할 때, (특정 픽셀 값이 배경에 속할 확률) 을 추정함으로써 (특정 픽셀 값이 주어졌을 때 배경일 확률) 을 알아내기
- GMM 학습 이후 각 픽셀의 분포에 따라 probable foreground와 probable background로 라벨링
- 픽셀 분포를 바탕으로 그래프 구성 →
- Source 노드와 Sink 노드 추가
- 모든 foreground 픽셀은 Source, background는 Sink에 연결
- 픽셀이 전경/배경일 확률에 따라 Source/Sink 노드를 잇는 엣지의 weight 설정
- 픽셀 간 엣지의 weight은 픽셀의 유사성 (색상 차이)에 따라 결정 → 차이가 크면 weight(가중치)이 작다
- mincut 알고리즘으로 Source노드와 Sink 노드를 최소 비용 함수를 갖도록 그래프를 두 부분으로 분할 (cost는 잘린 엣지들의 weight 합)
- 그래프 분할 후 Source 연결된 픽셀 = 전경 / Sink 연결된 픽셀 = 배경
- 분류 결과가 변하지 않을때까지 과정을 계속 반복
Code
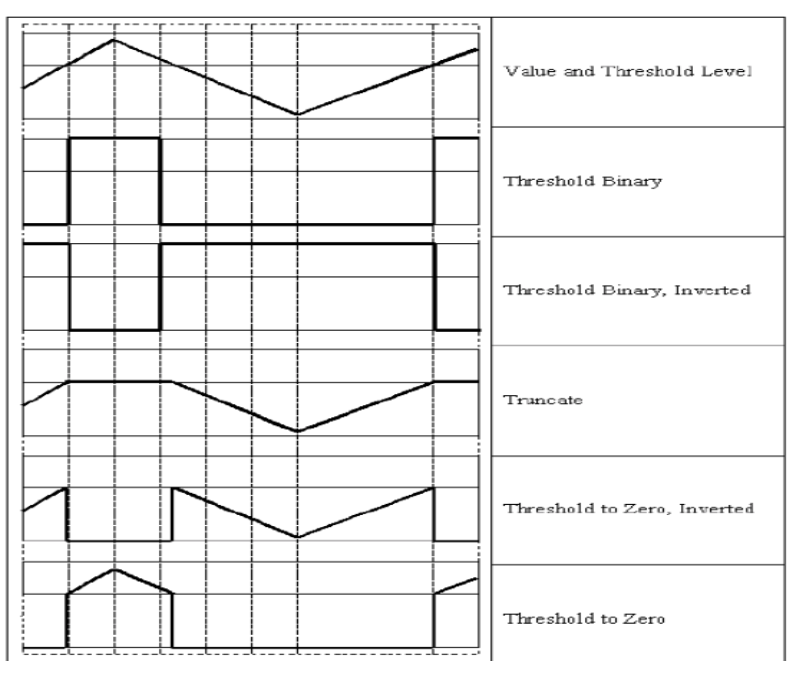
Threshold operation
threshold
double threshold(
InputArray src,
OutputArray dst,
double thresh,
double maxval,
int type
);thresh: 임계값maxval:type의 조건에 따라 픽셀이 임계값을 넘었을 때 할당될 값type: 임계값 적용 방식 결정THRESH_BINARY:thresh보다 크면maxval로, 작거나 같으면 0으로THRESH_BINARY_INV:THRESH_BINARY의 inverseTHRESH_TRUNC:thresh보다 크면thresh값으로 바꾸고 작거나 같으면 그대로THRESH_TOZERO:thresh보다 크면 그대로, 작거나 같으면 0으로THRESH_TOZERO_INV:THRESH_TOZERO의 inverse
Example
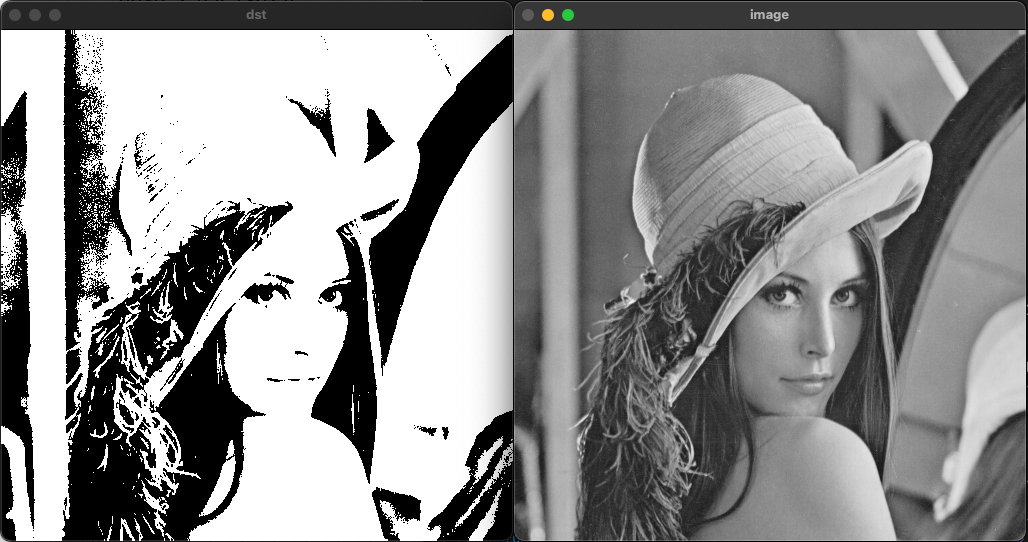
void testThreshold() {
Mat image = imread("lena.png");
Mat dst;
cvtColor(image, image, COLOR_BGR2GRAY);
threshold(image, dst, 100, 255, THRESH_BINARY);
imshow("dst", dst);
imshow("image", image);
waitKey(0);
}result
adaptiveThreshold
void adaptiveThreshold(
InputArray src,
OutputArray dst,
double maxval,
int adaptiveMethod,
int thresholdType,
int blockSize,
double C
);maxval: 임계값을 통과한 픽셀에 적용할 값adaptiveMethod: 임계값을 계산하는 방법ADAPTIVE_THRESH_MEAN_CADPATIVE_THRESH_GAUSSIAN_C
thresholdType: 적용할 임계처리 방식THRESH_BINARY,THRESH_BINARY_INV만 사용blockSize: 임계값을 계산할 때 참조할 주변 영역 크기C:adaptiveMethod로 계산된 평균에 뺄 값
Example
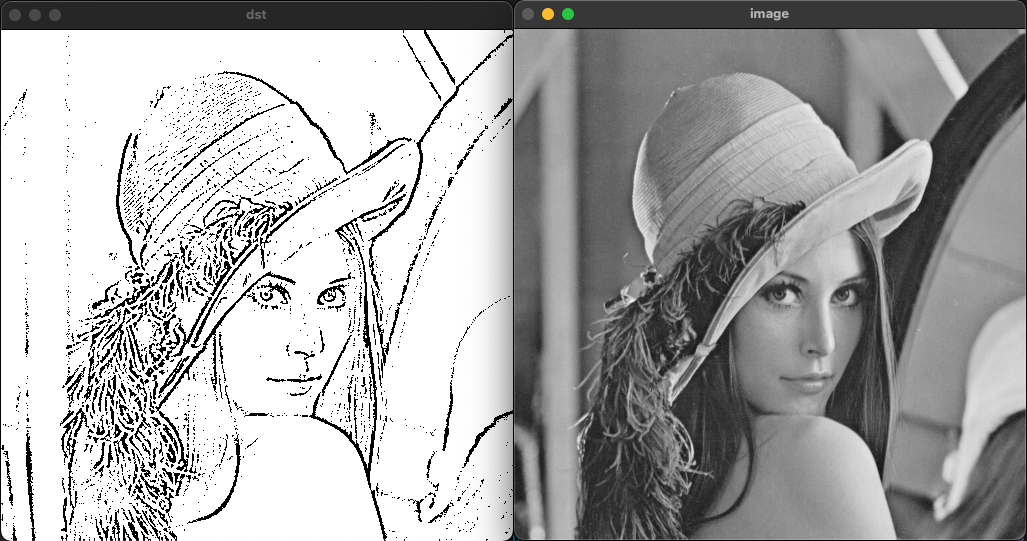
void testAdaptiveThreshold() {
Mat image = imread("lena.png");
Mat dst;
cvtColor(image, image, COLOR_BGR2GRAY);
adaptiveThreshold(image, dst, 255, ADAPTIVE_THRESH_MEAN_C, THRESH_BINARY, 7, 10);
imshow("dst", dst);
imshow("image", image);
waitKey(0);
}
Result
inRange
void inRange(
InputArray src,
InputArray lowerb,
InputArray upperb,
OutputArray dst
);lowerb: 범위의 하한값 Scalarupperb: 범위의 상한값 Scalar
Example
void testInRange() {
Mat image = imread("hand.png");
Mat dst;
cvtColor(image, image, COLOR_BGR2YCrCb);
inRange(image, Scalar(0, 133, 77), Scalar(255, 173, 127), dst);
cvtColor(image, image, COLOR_YCrCb2BGR);
imshow("dst", dst);
imshow("image", image);
waitKey(0);
}Result

Global Thresholding
Basic method
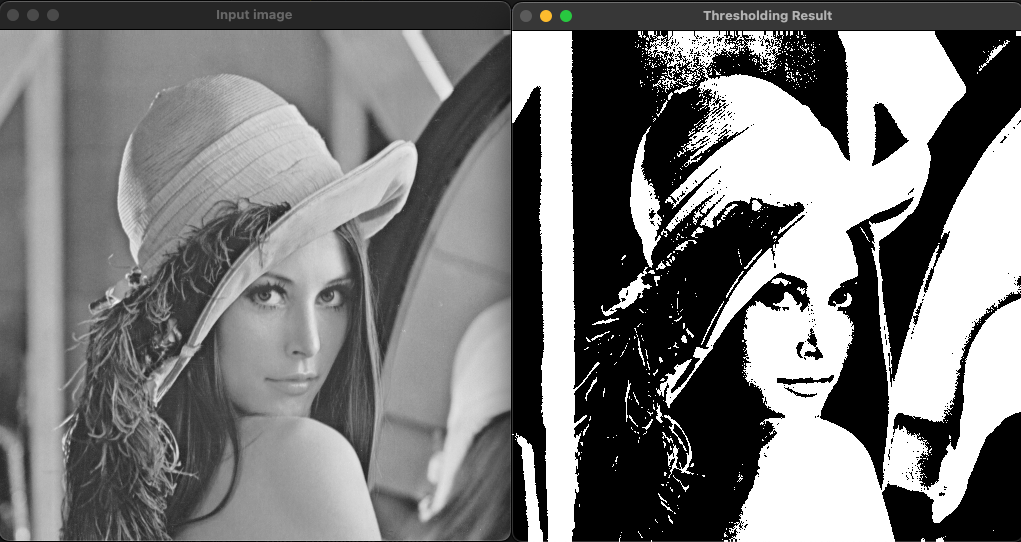
void testGlobalThresholding_BasicMethod() {
Mat image, thresh;
int thresh_T, low_cnt, high_cnt, low_sum, high_sum, i, j, th;
// 초기 임계값과 종료 조건 설정
thresh_T = 200; // 임계값의 초기 추정치
th = 10; // 반복을 멈출 조건 (이전 임계값과 새 임계값의 차이)
low_cnt = high_cnt = low_sum = high_sum = 0;
image = imread("lean.png", 0);
cout << "Initial threshold value: " << thresh_T << endl;
// 최적의 임계값을 찾기 위한 무한 루프
while (1) {
// 1. 모든 픽셀을 두 그룹으로 분류
for (j = 0; j < image.rows; j++) {
for (i = 0; i < image.cols; i++) {
if (image.at<uchar>(j, i) < thresh_T) {
// 현재 임계값보다 어두운 픽셀 그룹
low_sum += image.at<uchar>(j, i);
low_cnt++;
} else {
// 현재 임계값보다 밝은 픽셀 그룹
high_sum += image.at<uchar>(j, i);
high_cnt++;
}
}
}
// 2. 두 그룹의 평균 밝기 계산
int avg_low = low_sum / low_cnt;
int avg_high = high_sum / high_cnt;
// 3. 새로운 임계값 계산 (두 그룹 평균의 평균)
int new_thresh_T = (avg_low + avg_high) / 2;
// 4. 종료 조건 확인: 이전 임계값과 새 임계값의 차이가 th보다 작으면 반복
// 종료
if (abs(thresh_T - new_thresh_T) < th) {
break;
} else {
// 임계값을 새로 계산된 값으로 업데이트하고 다음 반복 준비
thresh_T = new_thresh_T;
cout << "Updated threshold value: " << thresh_T << endl;
low_cnt = high_cnt = low_sum = high_sum = 0; // 카운터 및 합계 초기화
}
}
// 5. 최종적으로 찾은 임계값으로 이진화 수행
cout << "\nFinal threshold value: " << thresh_T << endl;
threshold(image, thresh, thresh_T, 255, THRESH_BINARY);
imshow("Input image", image);
imshow("Thresholding Result", thresh);
waitKey(0);
}
Otsu’s Method
void testGlobalThresholding_OtsusMethod() {
Mat image, result;
image = imread( "lena.png", 0);
threshold(image, result, 0, 255, THRESH_BINARY | THRESH_OTSU);
imshow("input", image);
imshow("result", result);
waitKey(0);
}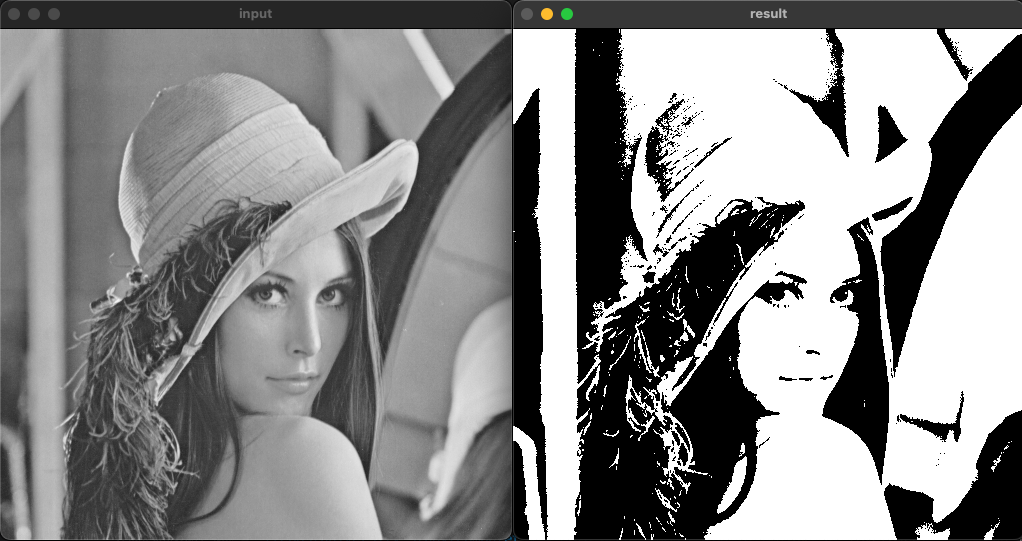
Otsu’s algorithm 설명
픽셀의 히스토그램을 기준으로 두 개의 그룹으로 나누었을 때, 그룹 내부의 픽셀 값들이 가능한 서로 비슷하고, 두 그룹 간에 차이가 크도록 하는 임계값 T를 찾기
Within-class variance (클래스 내부 분산)
이미지 픽셀들을 N개 클래스로 나누었을 때 within class variance 는
로 정의 가능
- : 클래스 i의 픽셀 비율 (클래스 i의 픽셀 수 / 전체 픽셀 수)
- : 클래스 i 내부의 픽셀 값 분산
Local(Adaptive) Thresholding
void testAdaptiveThresholding() {
Mat image, binary, adaptive_binary;
image = imread( "lena.png", 0);
threshold(image, binary, 150, 255, THRESH_BINARY);
adaptiveThreshold(image, adaptive_binary, 255, ADAPTIVE_THRESH_MEAN_C,
THRESH_BINARY, 85, 15);
imshow("input", image);
imshow("binary", binary);
imshow("adaptive binary", adaptive_binary);
waitKey(0);
}GrabCut
grabCut
void grabCut(
InputArray img,
InputOutputArray mask,
Rect rect,
InputOutputArray bgdModel,
InputOutputArray fgdModel,
int iterCount,
int mode = GC_INIT_WITH_RECT
);mask: background인지 foreground인지 정의한 마스크rect: foreground 객체를 포함하는 사각형bgdModel,fgdModel: 알고리즘이 내부적으로 GMM 정보를 저장하는데 사용iterCount: 알고리즘 반복 횟수mode: 함수가 어떻게 동작할지 결정GC_INIT_WITH_RECT:rect파라미터를 이용해 초기화 (사각형 외부는 배경, 내부는 전경 후보로)GC_INIT_WITH_MASK:mask에 확실한 전경/배경을 지정
Example
void testGrabCut() {
Mat result, bgdModel, fgdModel, image, foreground;
image = imread("dog.png");
Rect rectangle(15, 0, 155, 240);
grabCut(image, result, rectangle, bgdModel, fgdModel, 10, GC_INIT_WITH_RECT);
compare(result, GC_PR_FGD, result, CMP_EQ);
foreground = Mat(image.size(), CV_8UC3, Scalar(255, 255, 255));
image.copyTo(foreground, result);
imshow("origin", image);
imshow("Result", result);
imshow("Foreground", foreground);
waitKey(0);
}