Detection
Computer가 객체를 detect 하도록 만드는 방법
Training stage
- 대량의 Object 이미지와 non-object 이미지를 수집
- Object를 Represent하기에 적합한 Feature 를 찾기
- Object를 분류할 classifier/threshold 찾기
Test stage
- input 이미지에서 Feature을 추출
- Trained classifier를 사용하여 Object detect
Face Detection
Harr-like feature
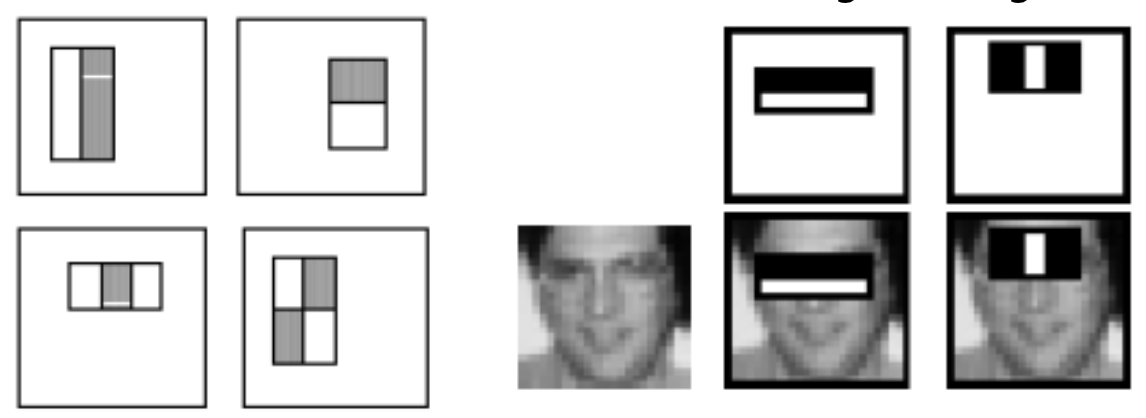
- 검은색 사각형 아래의 픽셀 합에서 흰색 사각형 아래의 픽셀 합을 뺀 값
- 원본 이미지의 어떤 위치와 어떤 스케일에서도 적용 가능
크기와 위치를 바꾸어 가며 많은 양의 feature을 생성하고, 사람의 얼굴을 잘 분류하는 feature들을 선택
Training
OpenCVdptjsms Adaboost (Adaptive Boosting) 이 사용됨.
- Boosting: weak-learner 집합이 strong-learner를 생성하는 과정
- Adaptive: 이미 훈련된 weak-learner들의 정확도에 따라 각 샘플의 가중치가 조정됨.
Cascade classifier
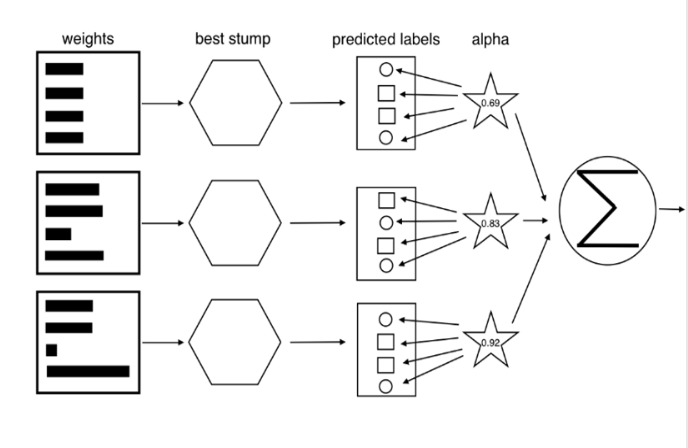
여러 개의 weak-learner 를 사용하여 strong-learner 를 생성
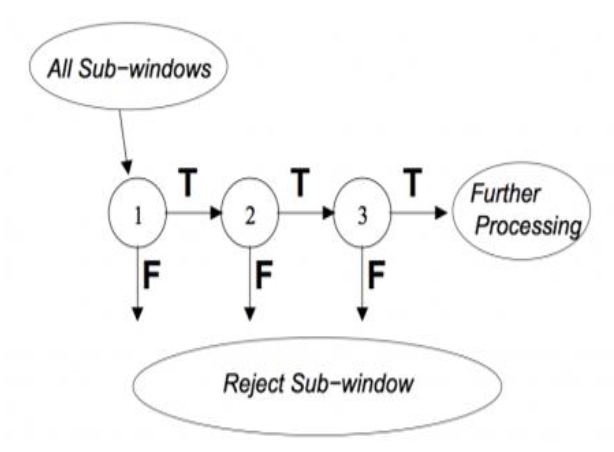
각 strong-learner가 cascade 형태로 연결됨
- 각 strong-learner 안의 weak-learner의 개수는 단계가 지남에 따라 감소
- Computational power를 줄이기
- 많은 non-face 영역이 제거될 수 있다.
Integral Image
Harr-like feature는 사각형 영역의 픽셀 합을 계산한다. (검은색 사각형 영역의 픽셀합-흰색 사각형 영역의 픽셀합)
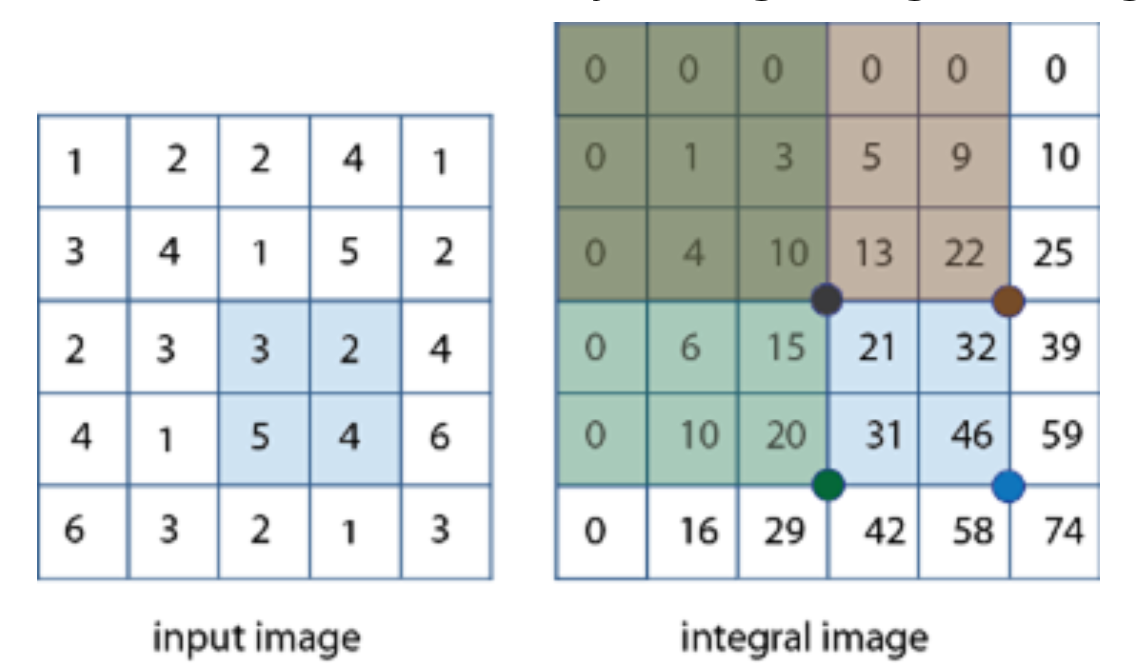
매번 사각형 픽셀 합을 영역 내의 모든 픽셀을 순회하며 계산하는 것은 비효율적임 (픽셀수-1 번 연산 필요)
Integral Image를 사용하면 3번의 계산만 있으면 된다 (두번의 뺄셈과 한번의 덧셈)
Tracking
Introduction
Basic Concept
- User-interaction이나 Detection을 통해 ROI를 선택
- ROI를 히스토그램이나 Feature로 표현
- 다음 프레임에서 ROI의 best matching patch를 찾는다.
- 프레임과 프레임 간 간격이 짧으므로 이전 ROI와 가까운 범위에서 탐색한다.
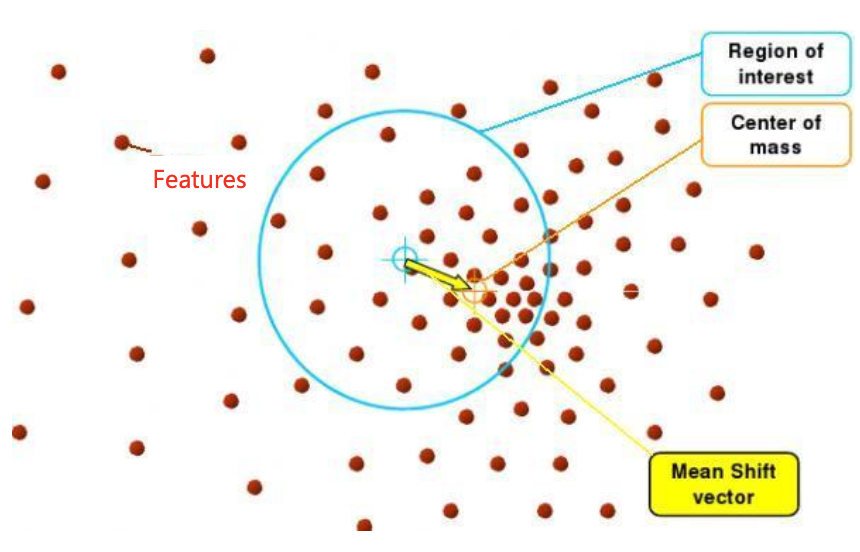
Meanshift (평균 이동)
주어진 이산 데이터 (Discrete data) 로부터 밀도 함수의 최대값 (Maxima) 를 찾는 과정 (iterative method)
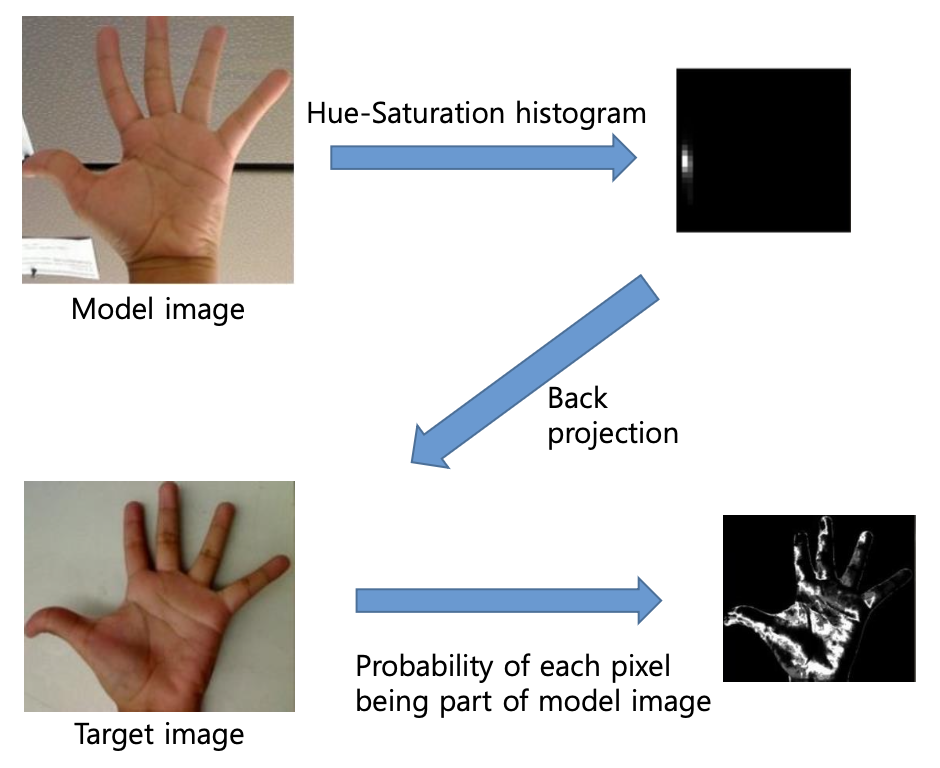
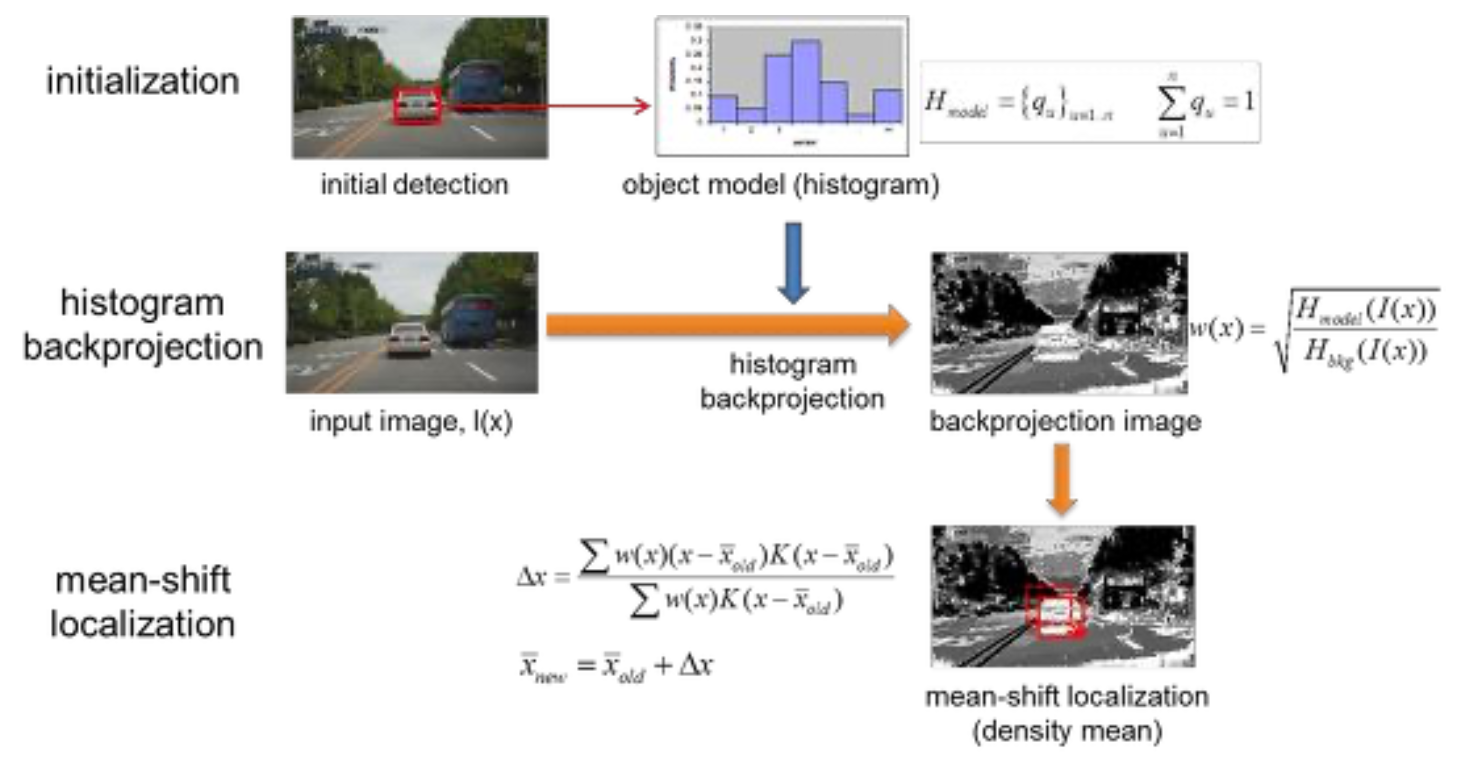
Histogram Back-projection (히스토그램 역투영)
- ROI 선택
- ROI를 히스토그램/feature 로 표현
- 다음 프레임에서 ROI와 가장 잘 일치하는 패치 탐색
- Histogram Back-projection
- 이미지의 각 픽셀이 tracking 대상의 일부일 확률을 계산
- 최대 픽셀 분포 윈도우 획득
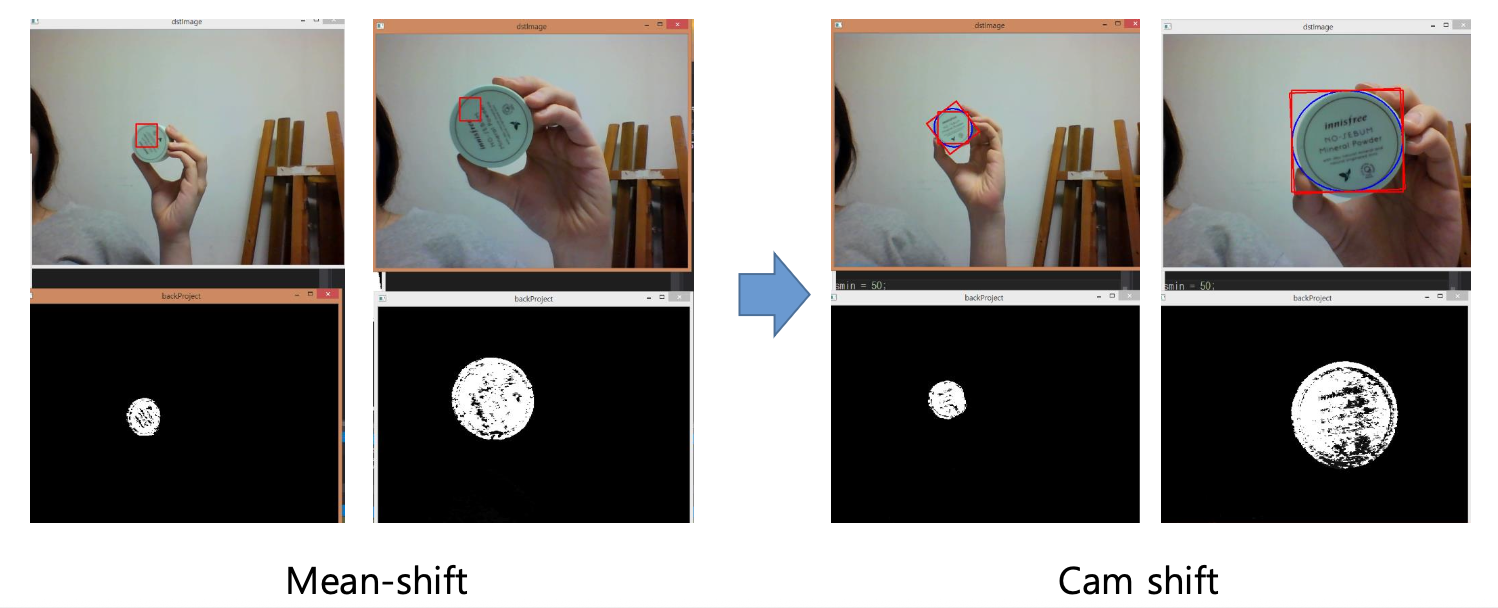
Camshift
Meanshift를 수정한 버전
검색 window의 크기가 바뀔 수 있다. (Adaptive size)
Optical Flow
연속된 프레임 사이에서 픽셀이 어떻게 움직였는가?
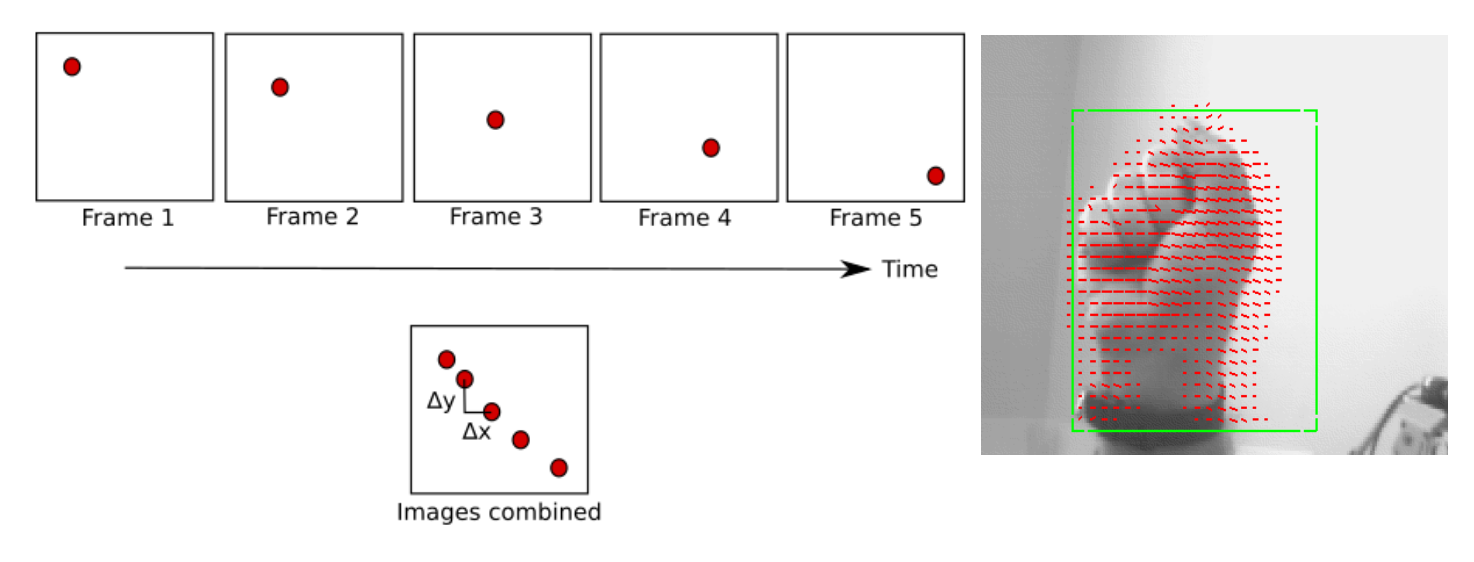
KLT 알고리즘
- Assumption
- Object의 Intensity는 다음 프레임에서 변하지 않고 위치만 바뀐다.
- 한 픽셀의 움직임은 인접 픽셀들의 움직임과 비슷하다. (덩어리째로 움직인다)
위 가정을 식으로 표현했을 때
여기세 테일러 급수를 적용하면
이므로 이 된다.
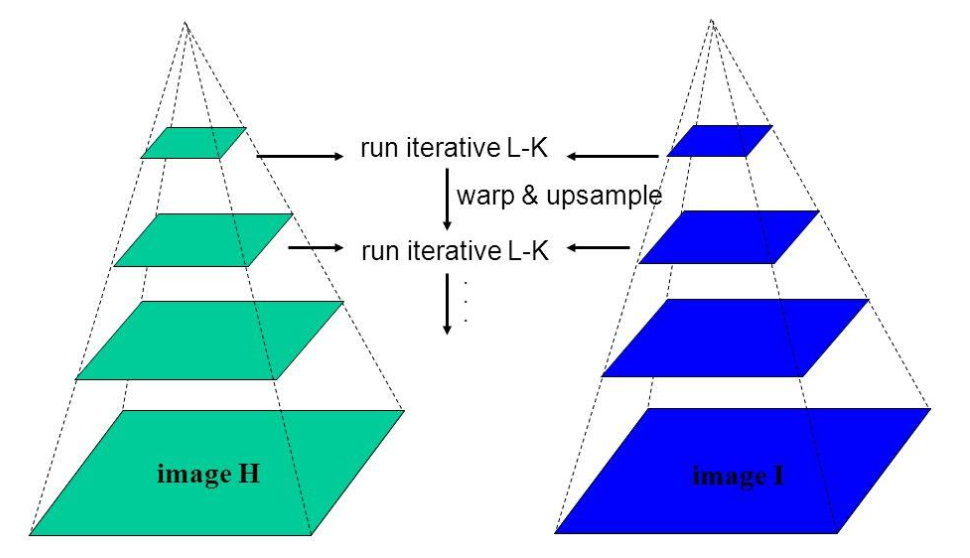
KLT 알고리즘 with pyramids
기존 KLT는 큰 움직임을 인식하기 어렵다. 큰 움직임을 작은 움직임으로 바꾸기 위해 피라미드 기법을 사용
Code
CascadeClassifier
CascadeClassifier face_classifier;
face_classifier.load("haarcascade_frontalface_alt.xml");detectMultiScale
void CascadeClassifier::detectMultiScale(
InputArray image,
vector<Rect>& objects,
double scaleFactor = 1.1,
int minNeighbors = 3,
int flags = 0,
Size minSize = Size(),
Size maxSize = Size()
);image: CV_8U 타입의 그레이스케일 이미지objects: 검출된 객체들의 Rect 목록을 저장scaleFactor: 이미지 피라미드에서 각 단계마다 이미지를 축소할 비율1.1= 10%씩 축소
minNeighbors: minNeighbors 개 이상의 겹치는 사각형이 검출된 영역만 객체로 인정한다.flags: 구버전 cascade와의 호환성을 위한 플래그 (보통 0)min/maxSize: 검출할 객체의 최소/최대 크기
Face Detection Example Code
void testCascadeClassifier() {
CascadeClassifier face_classifier;
Mat frame, grayFrame;
vector<Rect> faces;
VideoCapture cap(0);
if (!cap.isOpened()) {
cout << "Could not open camera" << endl;
return;
}
face_classifier.load("haarcascade_frontalface_alt.xml");
while (true) {
cap >> frame;
cvtColor(frame, grayFrame, COLOR_BGR2GRAY);
face_classifier.detectMultiScale(
grayFrame, faces,
1.1, // increase search scale by 10% each pass
3, // merge groups of three detections
0, // not used for a new cascade
Size(30, 30) // minimum size for detection
);
// draw the results
for (int i = 0; i < faces.size(); i++) {
Point lb(faces[i].x + faces[i].width, faces[i].y + faces[i].height);
Point tr(faces[i].x, faces[i].y);
rectangle(frame, lb, tr, Scalar(0, 255, 0), 3, 4, 0);
}
// print the output
imshow("Face Detection", frame);
if (waitKey(33) == 27) break; // ESC
}
}Tracking using meanShift and camShift
meanShift / camShift
int meanShift(
InputArray probImage,
InputOutputArray window,
TermCriteria criteria
)probImage: 입력 이미지 (calcBackProject로 생성된 흑백의 probability map)window: 이동된 창의 새 위치criteria: 알고리즘의 종료 조건